The impact of the wheel system on the maneuverability of AGV vehicles is primarily reflected in the following aspects:
1.Ability to Traverse Complex Terrain:
The design of the wheel system directly affects the AGV vehicle’s ability to pass over uneven surfaces. For example, AGVs with a four-steering-wheel layout can achieve omnidirectional movement, improving flexibility. However, if the design is not optimal, the driving wheels may become suspended when passing over sunken surfaces, leading to insufficient driving force or slippage. On raised surfaces, the load on the driving wheels may increase sharply, causing the current to exceed alarm thresholds and triggering operational faults.
2.Stability and Balance:
The layout and structure of the wheel system are crucial to the stability and balance of AGV vehicles. A well-designed wheel system ensures the AGV vehicle remains stable during operation, preventing tipping or loss of control due to uneven surfaces or sharp turns.
3.Steering Flexibility:
The configuration of the wheel system also affects the steering flexibility of AGV vehicles. For instance, a four-steering-wheel AGV can drive in multiple directions—longitudinal, lateral, or rotational—making it suitable for flexible operations in confined spaces. A two-steering-wheel AGV has near-comparable steering flexibility to a four-steering-wheel design, but under certain conditions, the resistance encountered by universal wheels during lateral or in-place rotation is more pronounced than that of four-steering or two-steering plus two-active-steering-wheel AGVs, which can sometimes be significant. The single-steering-wheel layout, due to the phenomenon of inner wheel difference, has the poorest maneuverability on flat surfaces.
Next, let’s discuss how different wheel system layouts affect steering maneuverability (maneuverability on complex surfaces will be analyzed when discussing the suspension system).
As shown in the diagram below, a single-steering-wheel layout allows the AGV vehicle to move forward, backward, and turn left or right/correct its course. The diagrams illustrate the turning capabilities of a single-steering-wheel AGV vehicle. From the first to the fourth diagram, the turning radius progressively decreases. However, due to interference from the ground and other factors, the smallest turning radius shown in the fourth diagram may result in an uncontrollable state. Therefore, the turning radius of the AGV vehicle is generally evaluated based on the third diagram.
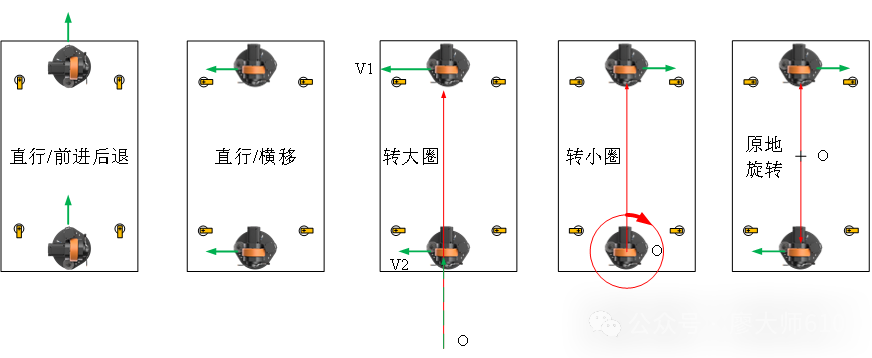
Although we previously mentioned that the operational stability of a two-steering-wheel AGV is not as good as that of a four-steering-wheel system, in most situations, it can maintain the same operational trajectory. As illustrated below, a two-steering-wheel AGV vehicle can not only move forward and backward but also move laterally and rotate in place. During an in-place turn, the wheelbase becomes the turning diameter of the AGV vehicle.
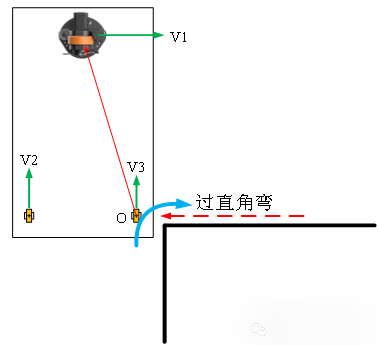
Let’s now illustrate the operational trajectories of single-steering and two-steering AGVs when making a right-angle turn. Since a single-steering AGV only has one driving wheel, during a right-angle turn, the rear wheels of the AGV must be pulled past the right angle to ensure the vehicle body does not collide with the corner, as shown in the diagram below.
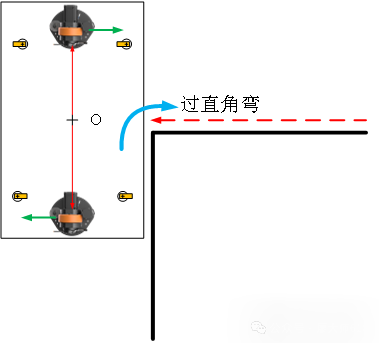
Now, let’s look at the situation with a two-steering-wheel AGV when making a right-angle turn. As shown below, since it has both front and rear driving wheels, the AGV vehicle can smoothly make the right-angle turn as soon as the midpoint of its driving wheels passes the corner. Therefore, with the same vehicle body size, the front clearance of a single-steering-wheel AGV must be larger than that of a two-steering-wheel AGV. In other words, compared to a single-steering-wheel AGV, the two-steering-wheel AGV has better maneuverability.
Conclusion:
In summary, the selection and design of the wheel system significantly impact the maneuverability of AGV vehicles. A well-planned wheel system layout and structure can improve the vehicle’s flexibility, stability, and ability to traverse complex surfaces. In practical applications, it’s crucial to select the appropriate wheel system configuration based on the specific working environment and task requirements, particularly regarding the configuration and layout of the driving wheels.
If you have any questions about features and performance,please consult the technical support personnel for assistance. Jiangsu Yikong Intelligent Equipment Co., Ltd. and its wholly-owned subsidiary Tongpu Electronics (Shanghai)Corporation L...
PSM ControllersDC ControllersAC ControllersConfiguration Software 🚀 Real-time motor parameters monition, such as voltage detection, speed and alarms view; 🔧 Customized motor parameters Configuration: such as p...
AGV handling robots are quickly becoming the most important smart devices in the logistics industry. On a global scale, in order to resist the impact of KIVA robots on the logistics industry, different AGV companies are constantly designing, de...
If the brake coil is damaged or not provided with proper power, it will not release, causing the motor shaft to be locked. While assessing electrical faults is straightforward, mechanical issues are more complex but can still be traced to a few co...
This website uses cookies to improve your browsing experience. By continuing to use this site, you accept the use of our cookies.
Data collected from this website is processed and stored in the United States. See Our Privacy Policy
 Yikong intelligent equipment
Yikong intelligent equipment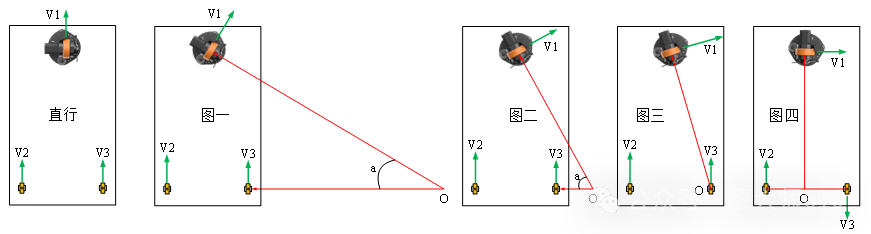





Hello!Please login