The wheel system layout of AGV (Automated Guided Vehicle) is one of the key factors in designing its performance and functionality. Depending on different application scenarios and requirements, the wheel layout of AGVs can vary. Below are some common AGV wheel layouts and their characteristics:
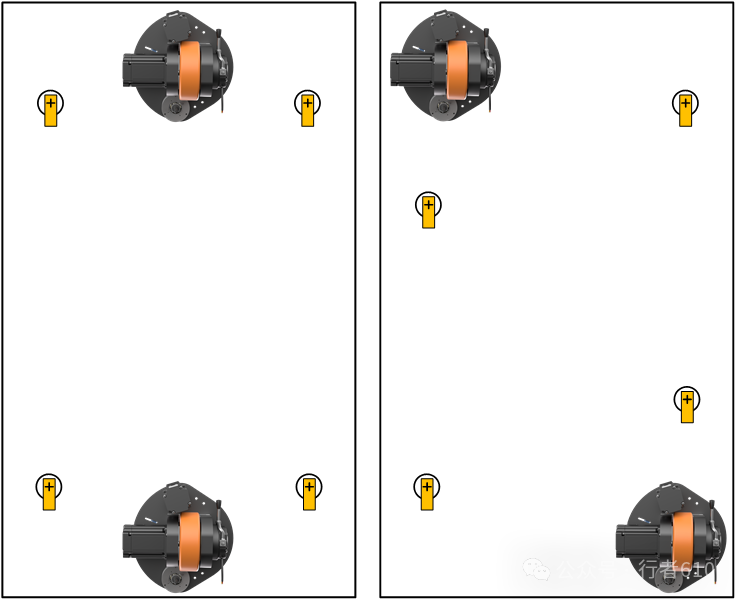
1. Single Steering Wheel Drive
Layout Characteristics: An AGV is equipped with a single steering drive wheel, usually located at the front or rear of the vehicle. It is paired with either two directional wheels or two directional wheels and two caster wheels to ensure stable support and steering.
Functional Features: It can achieve basic functions such as moving forward, backward, and turning left or right. The overall structure is simple, easy to control, low maintenance, and offers long service life.
Applicable Scenarios: Suitable for scenarios where high flexibility is not required, such as goods transportation in warehouses or material delivery along production lines.
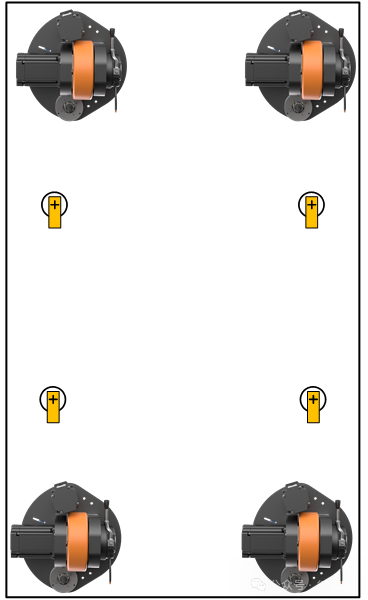
2. Dual Steering Wheel Drive
Layout Characteristics: The AGV is equipped with two steering drive wheels, usually located at the front and rear or diagonally, along with two or four caster wheels for added stability.
Functional Features: In addition to the basic functions of the single steering wheel layout, it can also achieve in-place rotation, lateral movement, and omnidirectional movement within a two-dimensional plane. Its performance is superior to the single steering wheel drive, offering greater load-bearing capacity, traction, and flexibility in control.
Applicable Scenarios: Suitable for environments requiring higher flexibility and precision, such as operations in narrow aisles or navigating complex paths.
3. Four Wheels or More
Layout Characteristics: This includes configurations with four, six, or even more wheels. These wheels can consist of all steering wheels, differential wheels, or hybrid configurations (steering wheels + caster wheels).
Functional Features: AGVs with four or more wheels typically have higher stability and load-bearing capacity. They can perform more complex movements, such as zero turning radius, lateral shifts, and full-range drifting with no dead angles. These capabilities enable AGVs to operate efficiently even in complex environments.
Applicable Scenarios: Suitable for heavy-load transport in industries, automated operations in large warehouses, and high-precision material handling along production lines.
4. Other Special Layouts
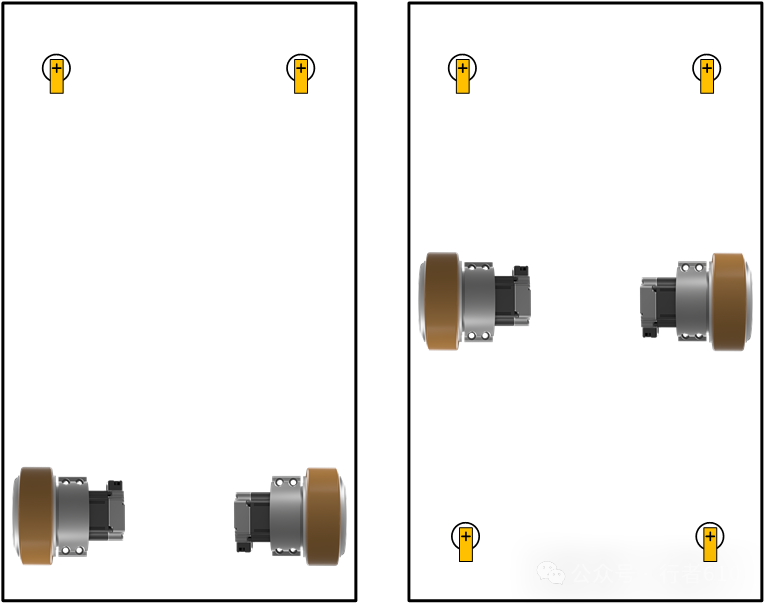
In addition to the common wheel layouts mentioned above, there are some specially designed AGV wheel layouts, such as dual differential wheel configurations (capable of moving forward, backward, turning, and in-place rotation around the midpoint of the differential wheels), Mecanum wheel layouts (allowing omnidirectional movement), and track-based layouts (ideal for uneven terrain). These special layouts are customized according to specific application scenarios and needs.
Summary:
Here are some additional layout tips, using an AGV with two drive wheels and four caster wheels as an example:
- For AGVs running in a fixed loop, try to ensure that the projection of each wheel’s path on the ground is separated. For example, in straight-line motion, six non-overlapping straight tracks will help extend the life of the ground surface.
- If the AGV operates on a slope that is perpendicular to the edge of the incline, ensure the drive wheels are parallel to the auxiliary wheels. This way, both drive and auxiliary wheels will be on the incline simultaneously, minimizing load imbalance on the wheels and maintaining optimal pressure on the drive wheels.
- If the AGV is operating on a surface with regularly spaced grooves, it’s best to arrange the four auxiliary wheels in a diamond pattern. This will prevent two auxiliary wheels from simultaneously dropping into the grooves, ensuring the vehicle remains level and reducing load imbalance on the wheels.
Regardless of the layout chosen, the projection of the auxiliary wheels should ideally fall within or slightly exceed the diameter of the circle formed by the distance between the two drive wheels. This minimizes the AGV’s resistance arm in comparison to its power arm, reducing peak currents on the drive wheels and thereby improving the stability of the AGV’s operation.
In conclusion, AGV wheel layouts vary, each offering unique characteristics and suitable scenarios. When selecting a wheel layout, it’s essential to consider the specific application needs and scenario characteristics comprehensively.
- Phone:+86-15862845127+86-15370831872
- Whatsapp:+86-15862845127+86-15370831872
- Address:Building A8, No. 2699 Bingang Avenue, Binjiang Street, Haimen District, Nantong City, Jiangsu Province, China
- E-mail:info@bicontrols.comamanda@bicontrols.com
 Yikong intelligent equipment
Yikong intelligent equipment





Hello!Please login