Analysis of AGV Wheel System Layouts ④: A Simple Comparison of Central Axis and Diagonal Layouts
Central axis layout and diagonal layout are two common structural design methods for AGV diver wheels, each with its own unique characteristics and suitable applications. Let’s analyze these two layouts in a comparative overview:
I. Central Axis Layout
Layout Structure:
The drive wheels are mounted along the central axis of the AGV body, typically arranged symmetrically on both sides, as shown in the image below:
Structural Characteristics:
- The diver wheels are placed along the AGV body’s central line, symmetrically arranged from front to back.
- When moving in a straight line, the front and rear diver wheels adjust to the same angle to correct path deviations.
- During rotation, the left and right diver wheels turn 90 degrees, becoming differential wheels to enable rotation on the spot.
Advantages:
- The structure is relatively simple and offers good stability.
- Straight-line motion and in-place rotation are easy to achieve.
Suitable Scenarios:
- Ideal for scenarios requiring high stability and precise movement.
- Suitable for AGVs with larger loads that require stable movement.
II. Diagonal Layout
Layout Structure:
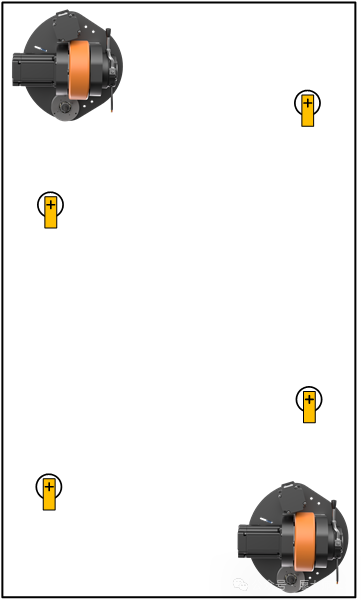
The drive wheels are mounted diagonally on the AGV body, with two drive wheels positioned at opposite corners, as shown in the image below:
Structural Characteristics:
- Diver wheels are arranged symmetrically around the AGV body’s center, typically located along the diagonal line of the AGV.
- Movement adjustments are generally more complex compared to the central axis layout, often requiring more precise control algorithms.
Advantages:
- Offers greater flexibility and maneuverability than the central layout; traction can outperform central axis layout in certain movements.
- Enables complex movements within confined spaces.
Suitable Scenarios:
- Ideal for scenarios requiring frequent directional changes and complex movements.
- Suitable for low-profile AGVs, such as tunnel AGVs, where diagonal layouts better accommodate low-clearance spaces.
III. Comparative Analysis During Operation
3.1 Straight-Line Movement Along the AGV’s Body Axis
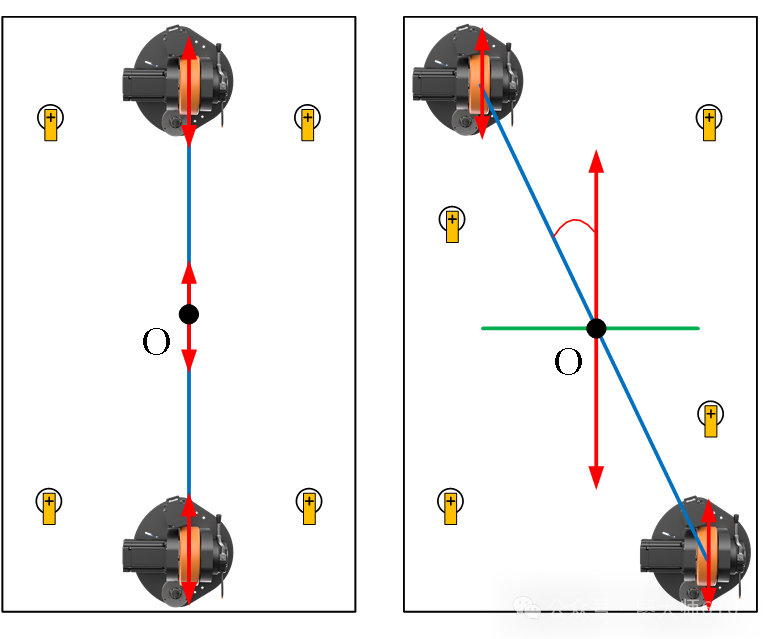
First, let’s examine the drive models for central and diagonal layouts during straight-line movement, as shown below:
- In the left image above, showing the central layout, both diver wheels align on the same path when moving forward or backward. Any speed differences or slippage between the diver wheels, resulting in inconsistent actual speeds or uneven output, will not affect the vehicle’s position. This only affects the speed along the red-arrow path, appearing as speed fluctuations due to the tension between the wheels.
- In the right image above, with the diagonal layout, a resultant force arm (shown in green) exists along the red-arrow path. Speed differences or slippage between the wheels in this layout will cause the vehicle to shift towards the slower or slipping wheel, causing the AGV body to tilt in that direction. This misalignment results not only in tension between the wheels but also in speed fluctuations and lateral swaying.
3.2 Lateral Movement Perpendicular to the AGV’s Body Axis
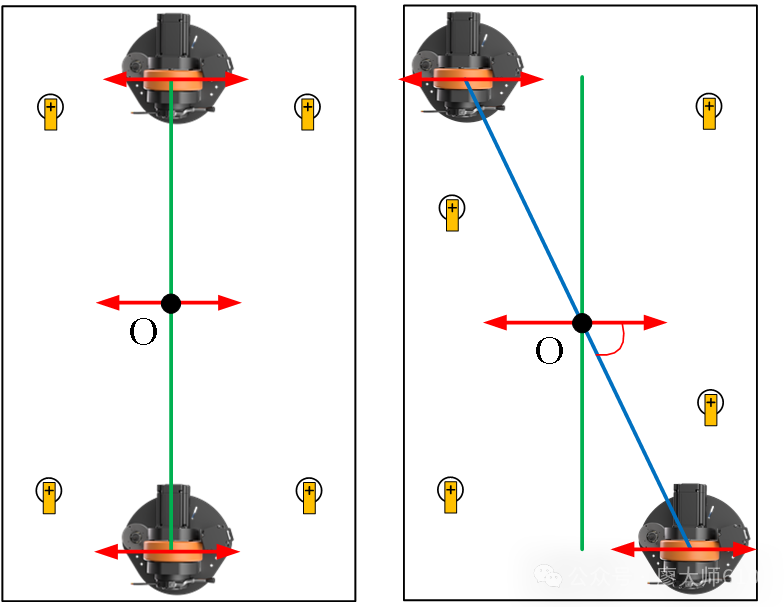
Next, let’s look at the lateral movement of central and diagonal drive models, as shown below:
- In both central and diagonal layouts, lateral movement creates a resultant force arm (shown in green) along the red-arrow path. Here, any speed difference or slippage between the diver wheels will cause the vehicle’s position to tilt toward the slower or slipping side, leading to misalignment and resulting in speed fluctuations and lateral swaying.
3.3 In-Place Rotation Centered Around the AGV’s Body
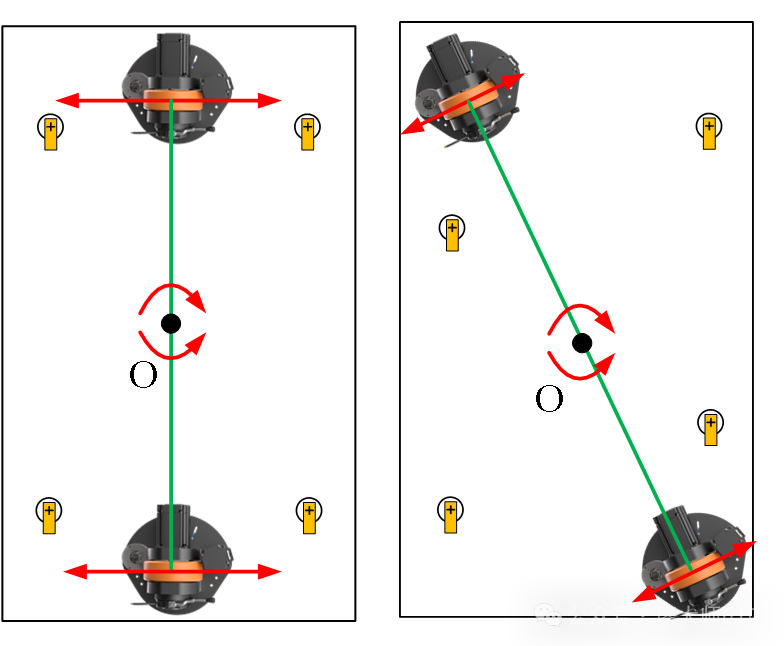
Finally, let’s examine the drive models for central and diagonal layouts during in-place rotation, as shown below:
- When the AGV rotates in place, the central layout has a shorter force arm (shown in green) compared to the diagonal layout. Therefore, for AGVs requiring frequent in-place rotation, the diagonal layout provides an advantage.
Summary:
Central and diagonal layouts each have their strengths. The choice of layout depends on the specific application and requirements of the AGV. The central layout offers greater stability and simpler control, while the diagonal layout emphasizes flexibility and high load capacity. In practice, it’s essential to consider the strengths and weaknesses of control algorithms when selecting a layout. Addressing specific requirements and analyzing each case individually is key; avoid oversimplifying or taking elements out of context for reference.
 Yikong intelligent equipment
Yikong intelligent equipment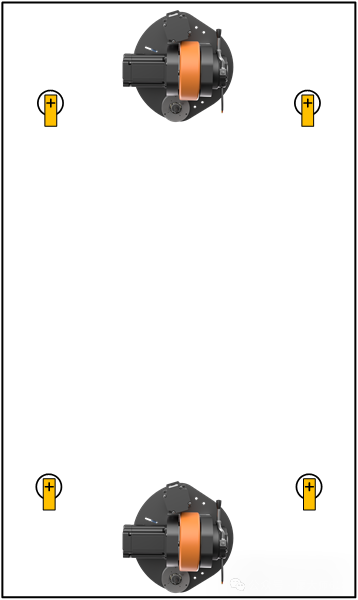





Hello!Please login