 Yikong intelligent equipment
Yikong intelligent equipmentWhat types of AGV trolleys include?
597The AGV car has a history of 50 years since its invention. With the expansion of the application field, its types and forms have become diverse. AG...
DetailsSite Search
I. Development path
The technical path of rudder wheel development is generally in top-down mode, first determining the power section of the straight section, selecting the appearance size according to market demand, setting the power density, and calculating the matching steering motor power according to the operating work system, operating conditions and expected application models.
Within the limited size range of each model, the motor type determination and parameter design are carried out, considering the influence of different motor types’ efficiency, precision and control difficulty on motor parameters.
Among them, the algorithm of motor parameters is designed and determined by our electrical experts according to the application characteristics, ground parameters, wheel material properties, operating speed, acceleration and deceleration requirements, different operating characteristics of no-load/load, working requirements and their mechanical models of AGVs, forklifts, electric balancing vehicles and other applied wheel-powered equipment, such parameters as motor current, voltage, inductance, frequency, rotational speed and number of pole pairs, rotation angle, pulse and consider the influence of rudder wheel diameter, wheel width, material and other parameters on rudder wheel performance after rudder wheel assembly.
After the electrical characteristics and dimensions of the motor are selected, the design and development of the rudder wheel is carried out. At this time, the rudder wheel needs to consider the battery, rudder wheel load capacity, rudder wheel overload capacity, wheel size, plane speed and acceleration, climbing angle, climbing speed and acceleration, vehicle rolling and traction friction, gear box and motor efficiency. Among them, plane operation also requires calculation of parameters such as resistance, acceleration, inertia force, motor output torque, motor current, etc., and setting a fixed climbing angle for verification.
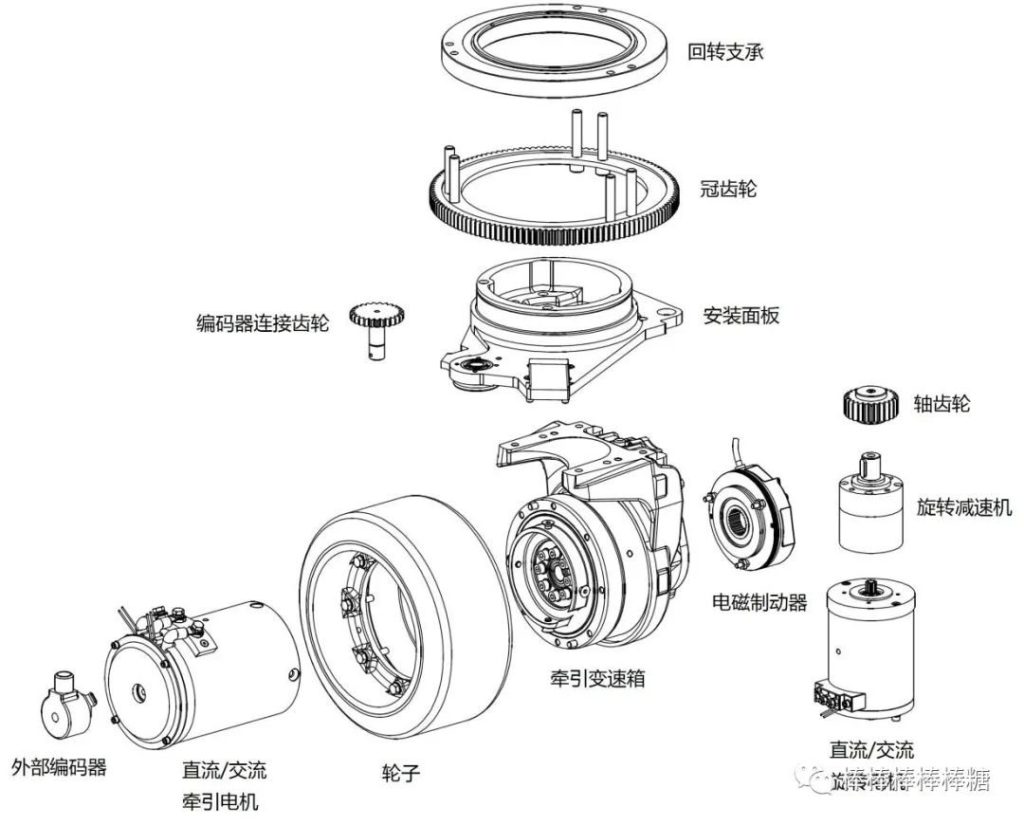
As a highly integrated product, the power density parameters of the rudder wheel directly affect the performance of the rudder wheel. Combined with the application requirements of speed, steering, start-stop and direction change in AGV scenarios, the design of the gears of the rudder wheel gearbox, the design of the gear motor parameters, the design of the steering slewing support and gears, and the selection of electrical accessories such as encoders, brakes and home switches all have an important impact on the overall effect of the rudder wheel. Among them, the gear design of the gearbox body takes into account the empirical values and the design of new application development, which is difficult to design.
In addition, as a highly precise and integrated product, the machining accuracy of the parts is very high, and the selection of materials and the calculation of the service life and fatigue life of the mating materials of each part need to be taken into consideration in the R&D.
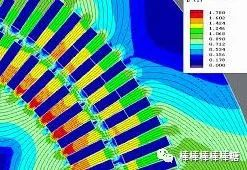
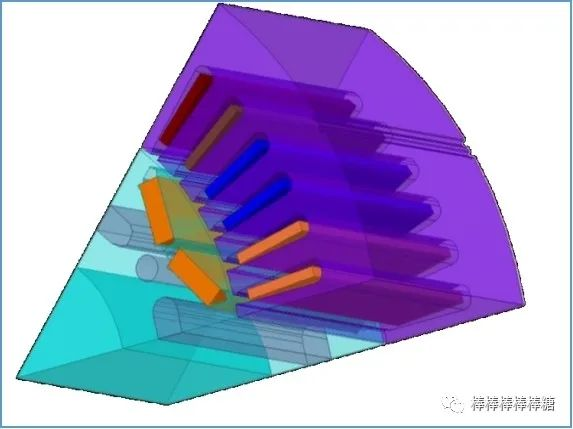
After the design of the rudder wheel is completed, as a product with both theory and practice, each new model needs to be simulated in the whole process before prototyping, including the simulation operation and magnetic field analysis of a single motor, the simulation operation without steering part, the simulation operation of a full set of products, and the force analysis of mechanical parts.
Finite element analysis is used to predict how the product will respond to realistic dynamic space distortions, vibrations, flowing fluids, and other physical effects. Determine if parts interfere, wear, or do not work as designed.
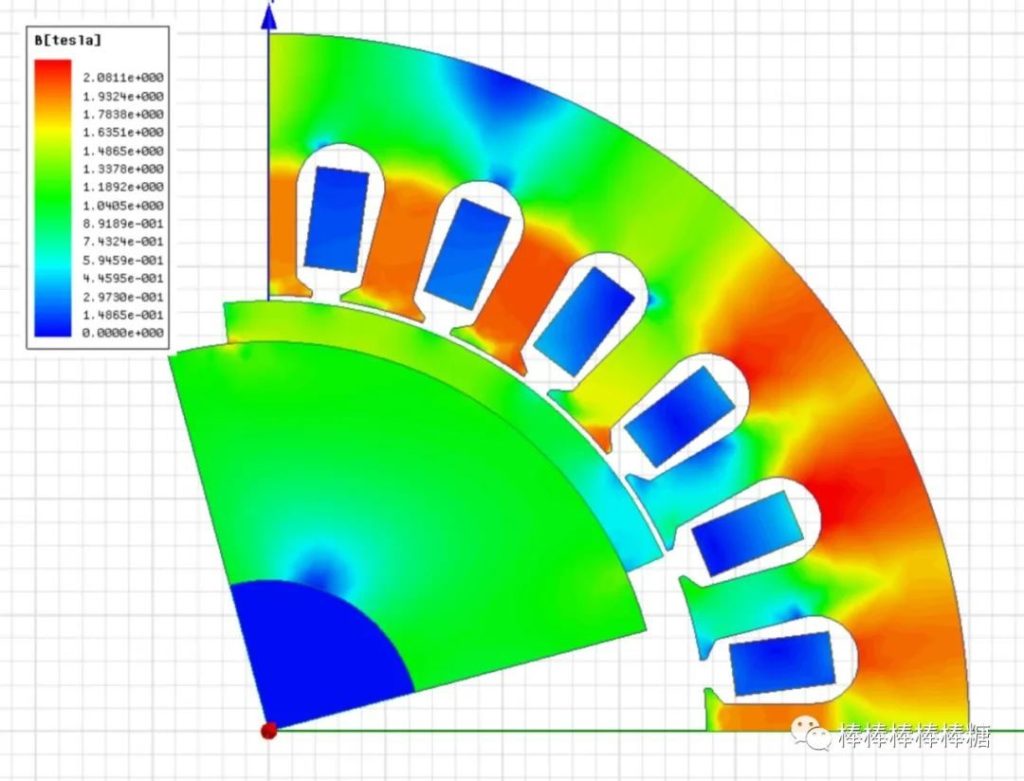
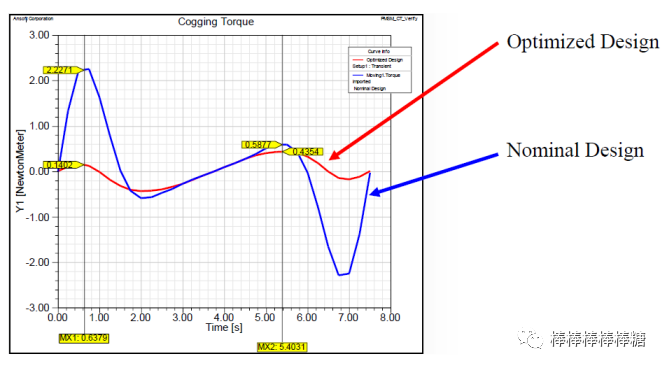
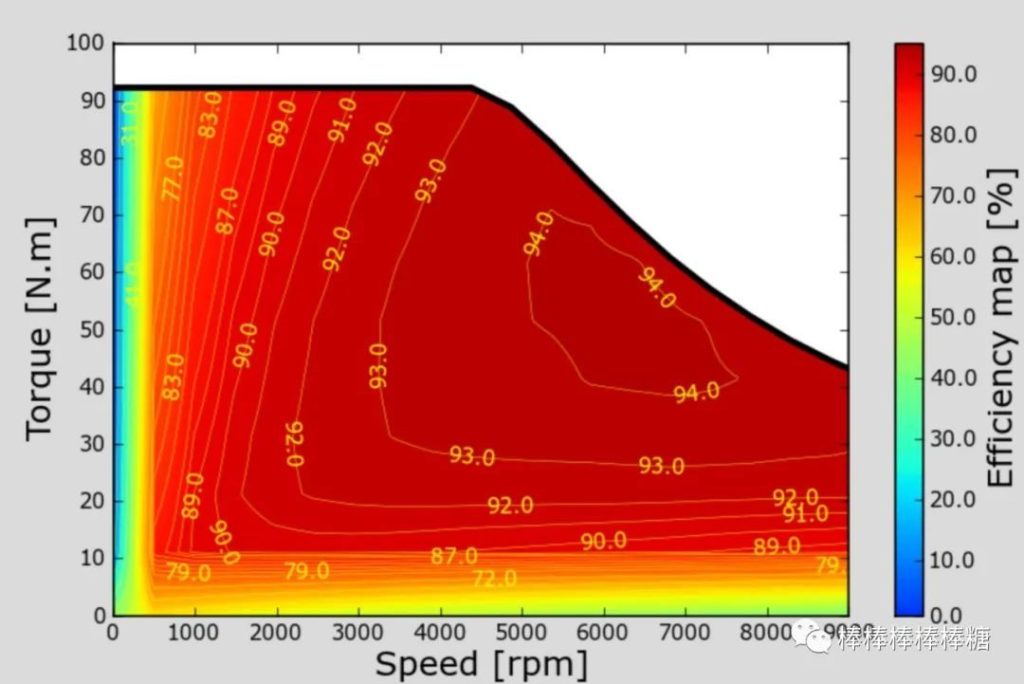
Maxwell analysis is then performed to simulate electronic motor operation with high accuracy and calculate all motor parameters, perform motor loss calculations, and minimize torque fluctuations. Optimize efficiency and reduce weight and size to achieve the best rudder power density.
We also simulate the harshest working environment to test the product and compare the test results with the finite element analysis findings. Even through a variety of simulation or simulation analysis, the motor obtained in the inductance and other parameters due to manual links, it is still difficult to wait for stable data, then the need to support the drive to set parameters in advance to ensure the smooth operation of the complete set of motion control module to ensure the best performance and efficiency of the motor.
Ⅱ. product features:
1, the helm wheel according to customer demand, design and selection of different motor types, voltage, current, torque, size and other drive motors in line with customer requirements, to meet the needs of different customers.
2, with integrated design technology, highly integrated, compact structure, high bearing strength. Can meet the requirements of AGV on the drive wheel high load, and at the same time convenient for batch processing and manufacturing.
3、Integrated speed sensor and angle measurement sensor, can complete 360° any angle direction control, control accuracy of ± 0.001 degrees, accurate control of AGV rudder wheel straight or steering.
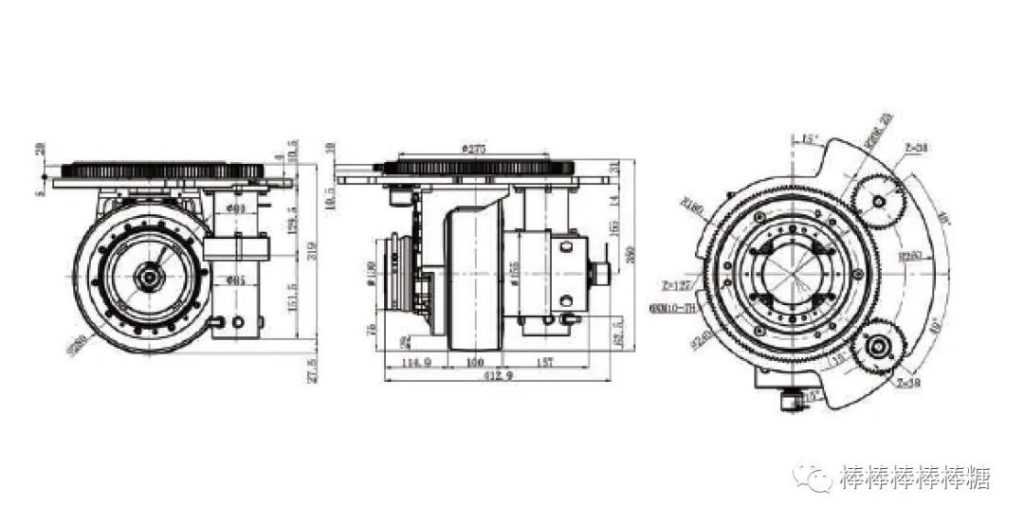
4、Adopt the design of anti-symmetric installation of motor and transmission box, which can greatly shorten the wheel spacing, save space and improve the torque while providing larger power.
Ⅲ. technical features:
1, designed a complete set of automatic guidance equipment control system system, including drive motor, steering motor, reducer motor, reducer system, electrical control system, power bus and the overall mechanical device.

The AGV car has a history of 50 years since its invention. With the expansion of the application field, its types and forms have become diverse. AG...
Details
It is not news that manufacturers around the world are feeling the pressure to keep up with the high demands of the market. A scarce labor market, ...
Details
AGV intelligent storage system solution Using AGV trolleys to automatically transport pallets in narrow aisle shelf areas in automated warehousi...
Details
AGV handling robots are quickly becoming the most important smart devices in the logistics industry. On a global scale, in order to resist the impact of KIVA robots on the logistics industry, ...
DetailsThis website uses cookies to improve your browsing experience. By continuing to use this site, you accept the use of our cookies.
Data collected from this website is processed and stored in the United States.
See Our Privacy Policy
Hello!Please login