
永磁同步电机无感控制策略研究:滑模观测器技术深度解析
发布时间:
2025-06-16
引言
在电机控制领域,无感控制技术因突破机械传感器限制与降低系统成本的需求,已成为工业应用与学术研究的重点方向。本文作为永磁同步电机(PMSM)无感控制专题的首篇技术论文,聚焦滑模观测器(SMO)方法,从理论基础到工程实现进行系统性阐述,为相关领域工程师提供技术参考。
一、无感控制技术背景综述
永磁同步电机的无感控制策略主要分为高频信号注入法与模型法两大类别。高频信号注入法通过在电机绕组注入特定高频激励信号,利用磁饱和效应提取转子位置信息,适用于零速和极低速场景;而模型法则基于电机电磁方程构建状态观测器,典型代表如滑模观测器、卡尔曼滤波器等。由于PMSM在低速区反电动势幅值微弱(与转速呈正比关系)、高速区电感参数强耦合,单一控制方法难以覆盖全速域运行需求。尽管学术界提出了非线性磁链观测器等全速域方案,但其实现复杂度与计算资源消耗显著增加,目前仍以分段策略为主导解决方案。
二、滑模观测器核心原理与实现
滑模控制作为一种典型的非线性控制策略,其本质特征在于利用不连续的开关行为动态切换系统结构。该方法的实现核心包含滑模面函数设计与滑模增益调节两个关键维度:通过构造合适的滑模面引导系统状态轨迹收敛至平衡点附近,再通过增益参数平衡动态响应速度与稳定性。这种控制结构对电机参数变化和外部干扰展现出优异的鲁棒性,但其固有的抖振现象会向系统注入高频电压/电流谐波,尤其在低速工况下引发显著的转矩脉动问题。
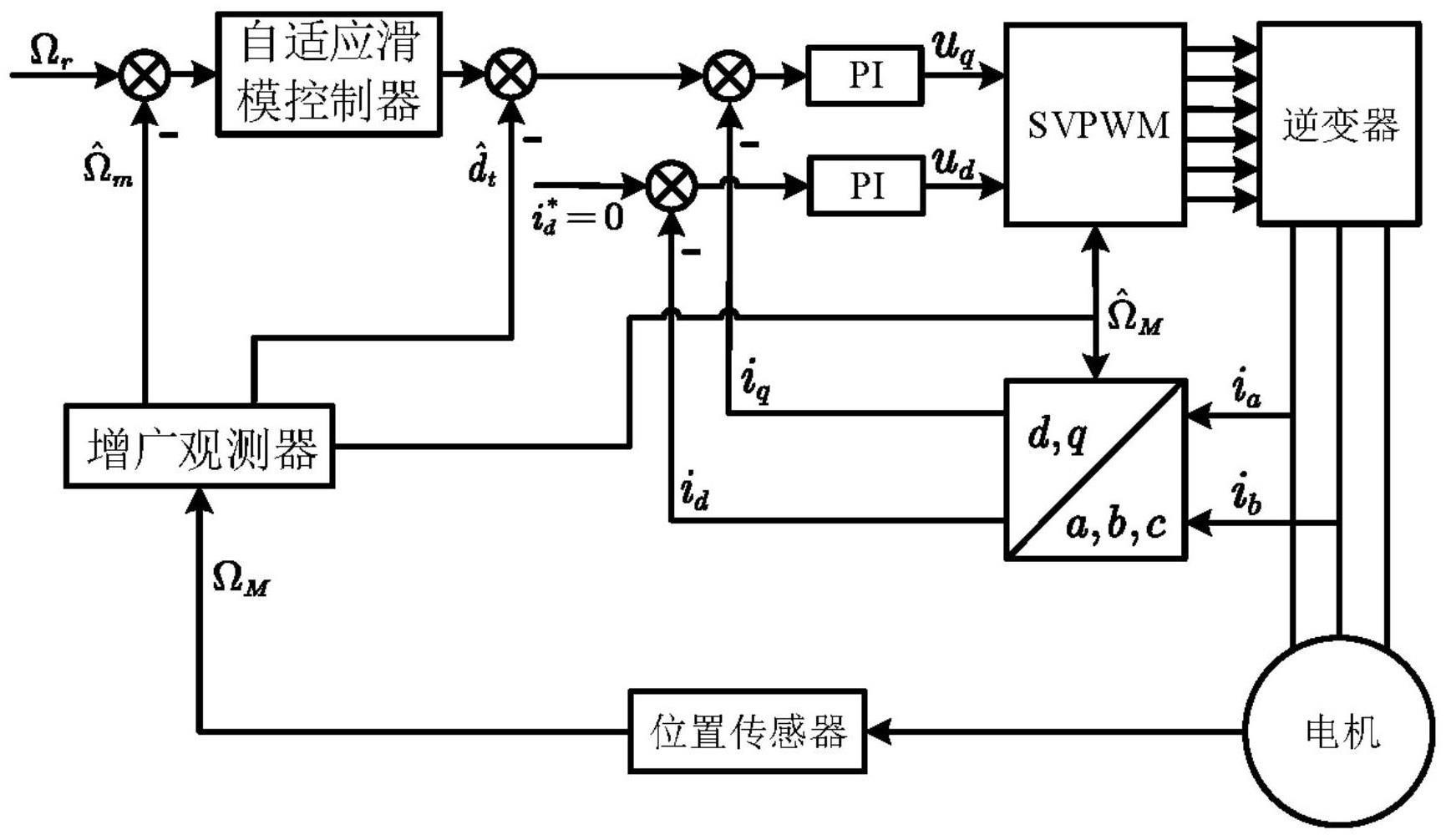
在三相PMSM控制系统中,滑模观测器通过实时计算定子电流跟踪误差重构反电动势信号,进而解耦出转子位置与转速信息。这种观测机制存在两个根本性矛盾:首先,提高切换频率与增益可加速观测器收敛,但同时会加剧高频噪声幅值;其次,当转速低于临界值(典型工况为50rpm)时,反电动势幅值降至毫伏级,而电流采样噪声、逆变器非线性失真等干扰可达同等量级,导致信噪比严重恶化。这些矛盾使得传统SMO在低速区域的观测精度显著下降。
在工程实现层面,传统滑模观测器采用三模块架构:电流观测器通过开关函数补偿电流误差,低通滤波器抑制开关高频噪声,位置提取模块则多采用锁相环(PLL)结构。其中PLL的性能取决于三个子单元的设计:鉴相器(PD)负责检测反电动势相位偏差,环路滤波器(LF)的带宽参数直接影响动态响应与抗噪能力的平衡,压控振荡器(VCO)则输出频率可调的转速估计值。滑模面函数通常选取α-β坐标系下的电流跟踪误差,而增益参数需通过实验整定实现最佳平衡。
仿真验证表明,采用SMO+PLL联合观测方案的PMSM系统在中高速区(>10%额定转速)可实现位置跟踪误差<3%、转速波动<±2%的优良性能;但在低速区域,位置观测曲线呈现周期性震荡特征,转速估算值波动幅度超过±15%,证明该方法在低速工况存在本质局限。
三、关键技术问题与工程解决方案
低速失效机理与应对策略
滑模观测器在低速工况失效的根本原因在于信号可观测性退化。当电机转速低于50rpm时,反电动势幅值通常小于20mV,而系统固有干扰(包括电流采样量化噪声、逆变器死区效应、绕组不对称等)可达5-10mV量级,此时信噪比(SNR)普遍低于2dB。在此条件下,位置信息被背景噪声完全淹没,传统观测算法难以有效提取特征信号。工程实践中可通过混合控制策略突破此瓶颈:在低速区切换至高频注入法,或采用基于脉振高频电压注入的信号增强技术。
抖振现象抑制方法
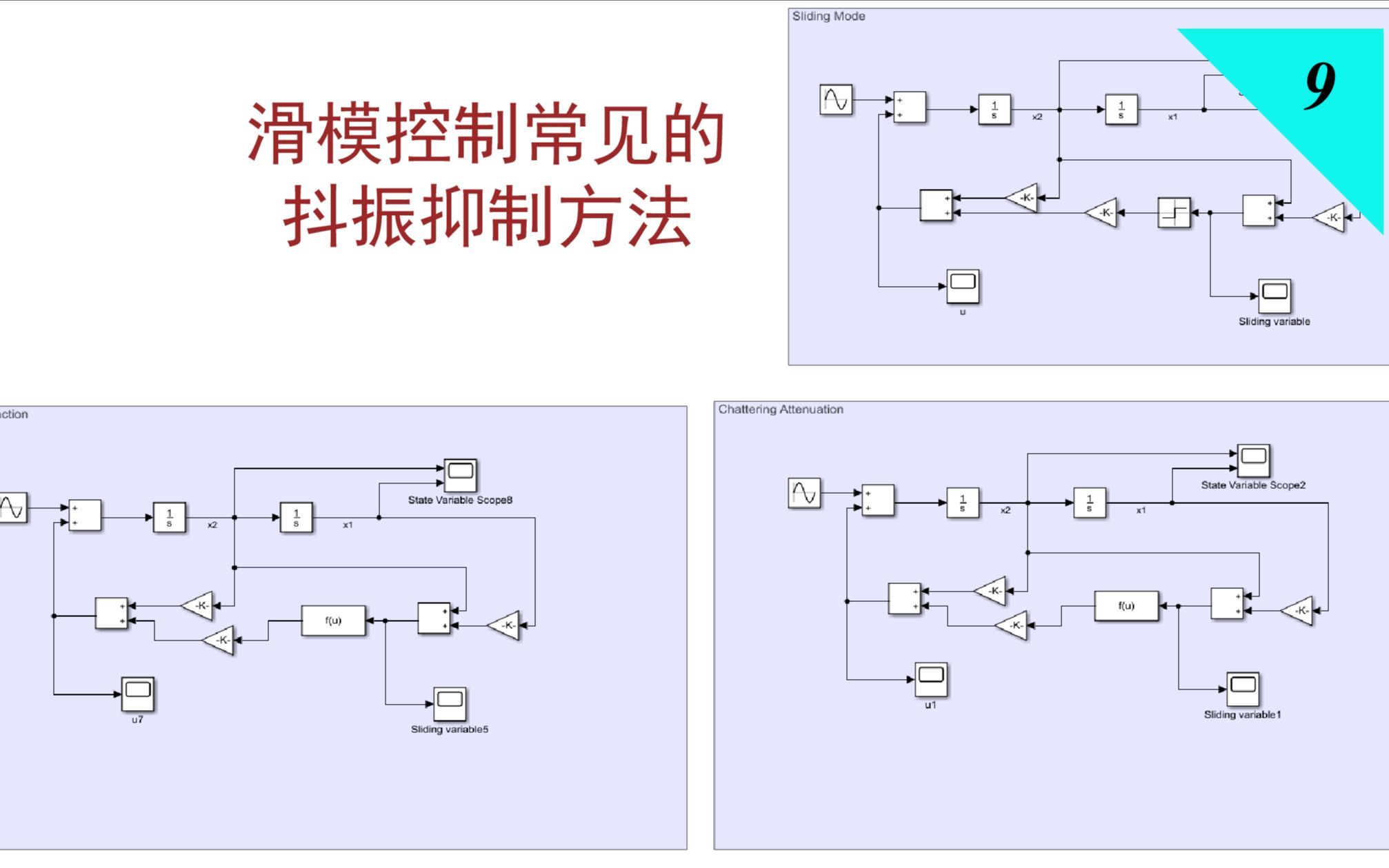
针对滑模控制固有的抖振问题,目前形成三类主流解决方案:
连续函数替代法采用饱和函数替换符号函数,通过设置边界层厚度δ实现平滑过渡,但会损失约15%的收敛速度;
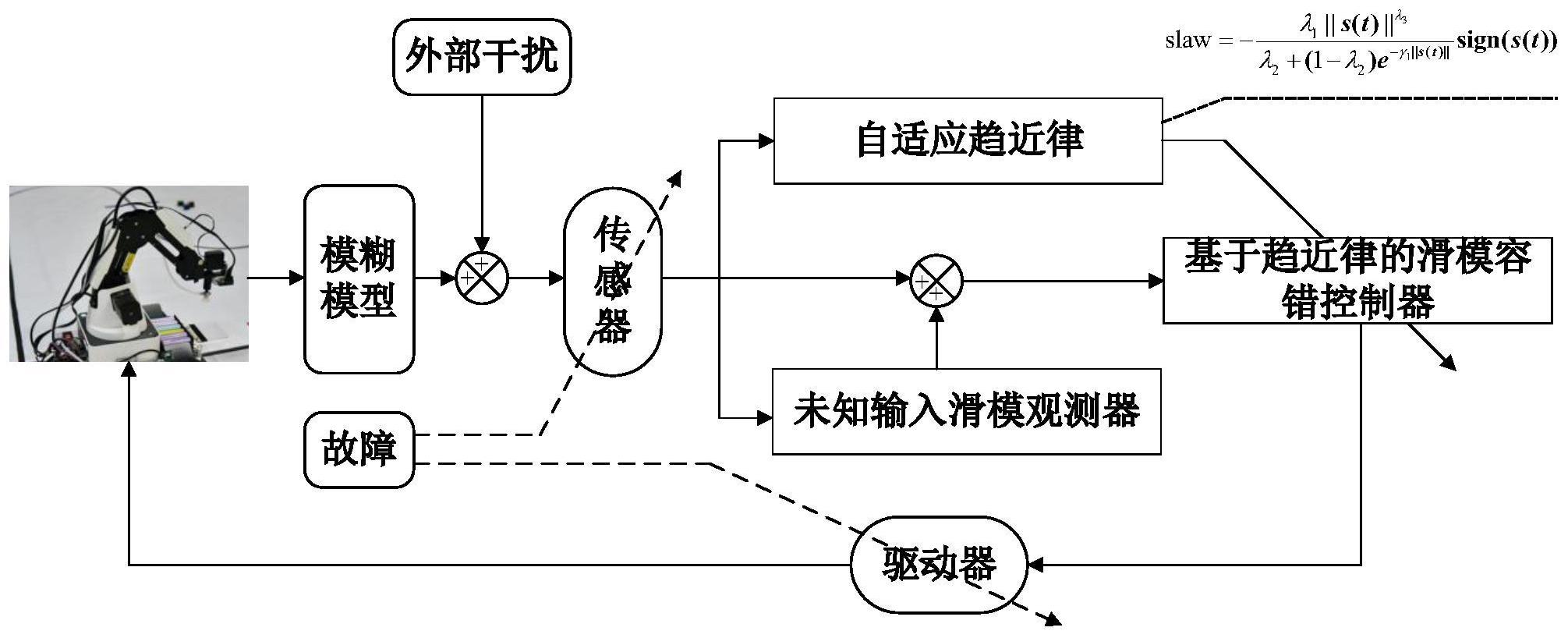
自适应增益策略设计增益系数随电流误差动态调整,大误差时提高增益加速收敛,小误差时降低增益抑制抖振,实测可降低40%电流谐波畸变率(THD);
高阶滑模算法如超螺旋(Super-Twisting)技术,在保持强鲁棒性的同时消除抖振,但计算负载增加约50%,需选用更高性能的处理器。
结语
滑模观测器凭借其对参数变化不敏感、抗干扰能力强的核心优势,已成为中高速PMSM无感控制的标准解决方案。然而其低速性能瓶颈与抖振缺陷仍需通过创新算法予以突破。工程实践中建议根据应用场景选择分段策略:中高速域采用SMO方案,极低速区切换至高频注入法,或采用基于参数自适应的混合观测器架构。随着处理器算力的持续提升,基于深度学习的观测器参数在线优化等新兴技术正逐步走向工程应用,这将为无感控制开辟新的技术路径。
更多资讯





微信:13802232914
邮箱:jimmy.tang@shtongpu.com
地址:江苏省南通市海门区滨江街道滨港大道2699号内63号楼

扫一扫 关注亿控智装备